On your mark, get set, GO!
 |
| One of our earlier designs with really high torque |
 This quickly proved not as easy as we thought it would be because we had to also come up with the most strategic way to also store the weight, PicoCricket, and also correctly position the motor so the gears line up. We tried really bulky designs specifically targeting holding the many parts but reasoned that there were more efficient ways to make a car and scrapped it. We also finagled with the gear and motor connection and figured that a 2 wheel drive was all that was necessary for this race.
This quickly proved not as easy as we thought it would be because we had to also come up with the most strategic way to also store the weight, PicoCricket, and also correctly position the motor so the gears line up. We tried really bulky designs specifically targeting holding the many parts but reasoned that there were more efficient ways to make a car and scrapped it. We also finagled with the gear and motor connection and figured that a 2 wheel drive was all that was necessary for this race.Our first running car had a gear ratio of 1:525 because we had 4 pairs of 8:40 tooth gears and featured an inversed Lego design, meaning all the pegs for the Legos were facing down because we figured that we can more easily put the motor and the motor board on the car.
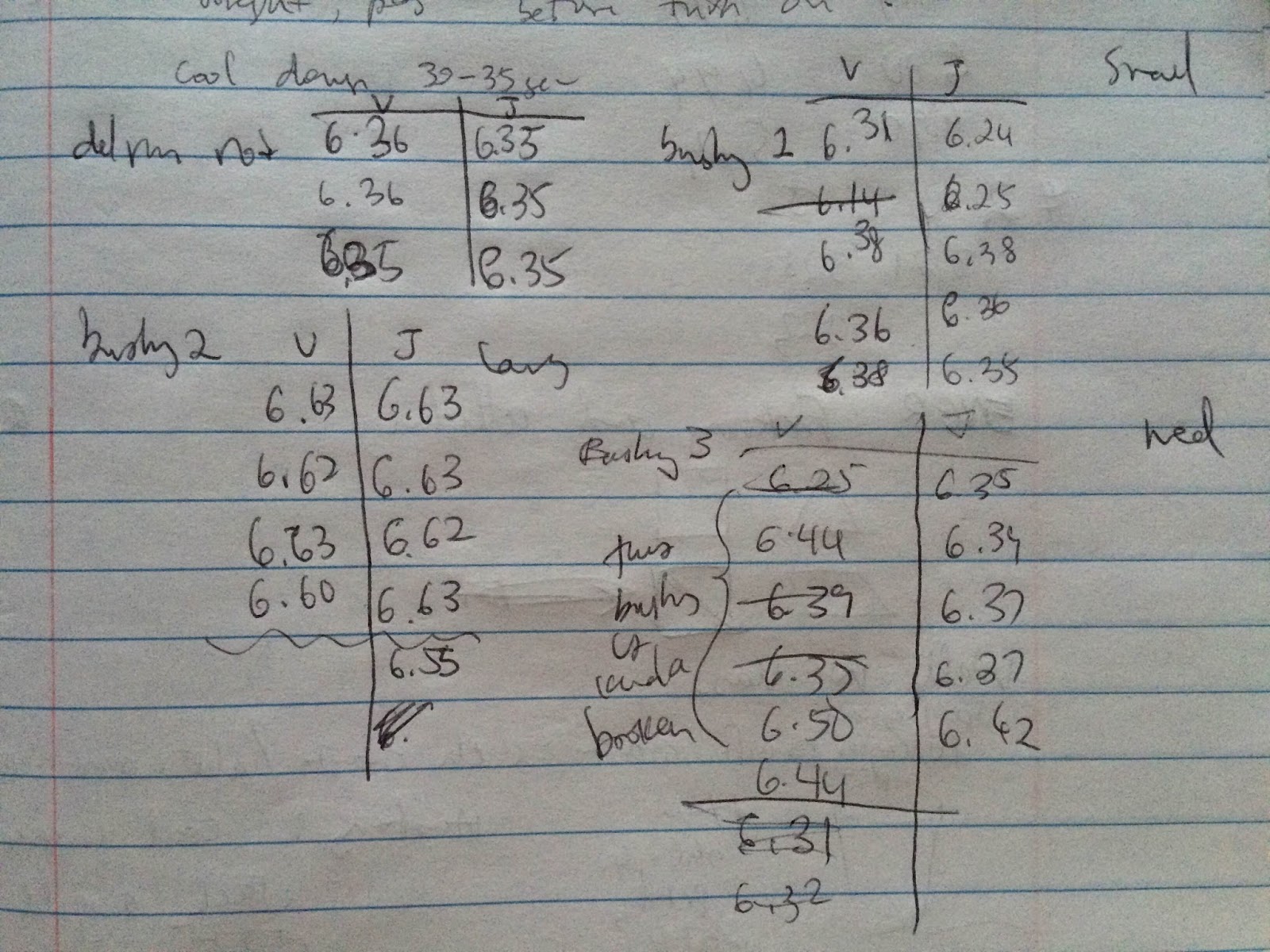
With our first working car being very slow we decided to test out other gear ratios:
- higher speed/lower torque: 8:24+ 8:24 Gear Ratio: 1:9 Result: too weak to carry weight
- since torque was too low lets add more gears: 8:24+8:24+8:40 GR: 1:45 Result: completes 4 m in 16 sec
- Still a little slow, lets reduce torque: 8:24+8:24 8:24 GR: 1:27 Result: completes 4 m in 11 sec
- let's see if we can make it faster! 8:24+8:40 GR: 1:15 Result: completes 4 m in 8 sec! Yay!
 |
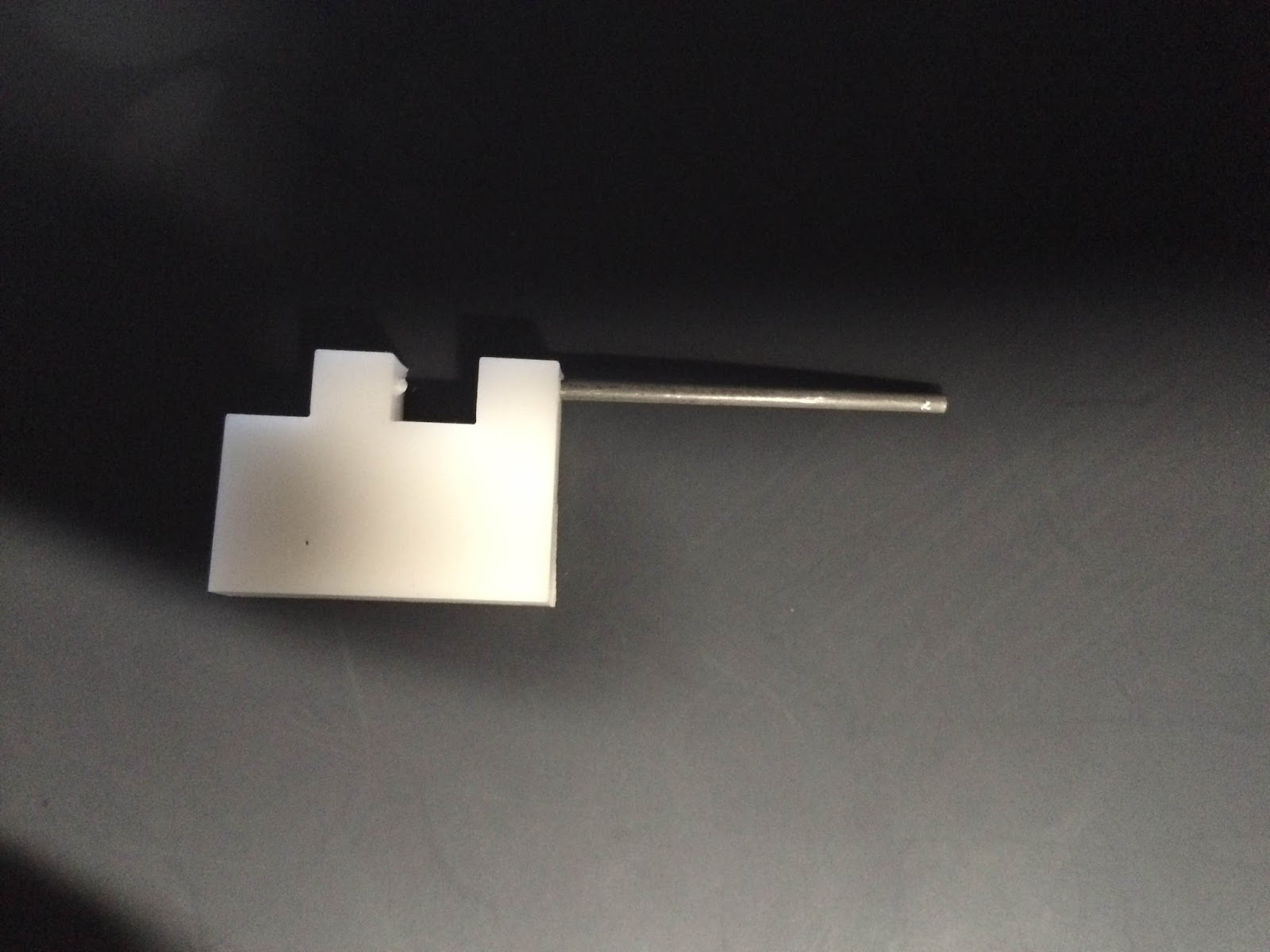
| Final Design |
Our final design was very minimalist to increase the speed as much as possible. We supported the PicoCricket and the weight between between two little walls of Legos. We also found out that making the big wheels the driven wheel is an advantage because they have more distance per roll due to their large circumference.